
江苏汇智作为江苏省技术经理人事务所,江苏大学专利培育与运营中心,长期致力于为企业、政府园区提供高质量、具有市场前景的专利资源,为更好地促进供需对接,加快创新成果向现实生产力转化,江苏汇智特别推出——汇集智慧 成果速递专栏,我们将不定期为大家推介一些优质专利和技术成果,欢迎大家关注。
本期是专栏第19期,小编为大家介绍2项来自江苏大学的专利成果,欢迎大家咨询了解哦!


江苏大学
本发明公开了一种基于混合路径规划自主导航的无人船水质监测物联网控制系统及方法,本物联网系统由上位机应用层、通信传输层、下位机感知层组成。应用层包含安卓手机客户端和PC端人机交互界面,界面主要包含地图、网络通信、数据显示、目标点导入、模式切换、方向控制、数据库等模块。感知层通过各种传感器模块采集数据信息,船体组成主要包括GPS模块、九轴陀螺仪模块、水质监测模块,推进电机模块。通信层为GPRS‑DTU模块,可以实现上位机和下位机间的数据传输。本发明可智能化自主导航并且能够在运动中完成避障,可适应复杂的水面情况;可以远程监控无人船运动和实时的水质参数信息,方便鱼塘的管理。

比传统人工检测方法更便捷,降低了水质检测作业的成本,克服了固定点检测测量范围有限等缺点,几乎可覆盖整个水域;更加智能化,可自主导航并且能够在运动中完成避障,可适应复杂的水面情况;可以远程监控无人船运动和实时的水质参数信息,方便鱼塘的管理;全局路径规划快速行进平方法(FMM)可以综合考虑航程长度势场Te、航线安全性势场Ts和航向角势场T g,所得出叠加的算法可以满足不同任务需求下的路径规划方案;本文动态避障算法可以实现无人船实时避障,在局部动态避障中能得到较平滑和连续的轨迹,保障无人船安全作业。服务器后台程序采用多线程技术接收数据,各线程负责每一种数据的结算,有序无误地显示在上位机可视化界面上。
为了解决当前无人船无法识别水面不可预知障碍物的问题,无人船在自主航行时可以应对复杂且不可预知的水面情况,能够避免无人船在作业过程中发生碰撞导致受损,完成待测点的巡检获得水质参数,无人船将采集的水质参数上传至服务器后台程序的数据库中。
转化方式:转让
成熟度:研制阶段
联系方式:0511-82010055 18118406566(张老师)
江苏大学
本发明公开了一种实时可抗风浪无人船的航线控制方法及其水质监测系统,采用基于Cortex‑M4内核的STM32F407单片机为无人船的主控制器,其中船体左右侧各装有一对小型水下电机用来适应风浪,后侧装有两个推进电机提供前进动力,船上搭载了GPS定位模块、电子罗盘模块、GPRS模块、溶解氧传感器,主控制器解算各项模块的数据,再将数据通过GPRS传送至基于C#.NET编写的上位机服务器后台程序,上位机对采集的数据分析可视化并将水质参数上传至数据库,同时发送命令给无人船实现自动导航,在地图上显示运动轨迹。该系统不仅扩大了水质监测范围,而且在风浪环境下也能自动矫正自身位置,可以广泛应用于农业水产养殖、海洋测绘以及污水监测等场景。
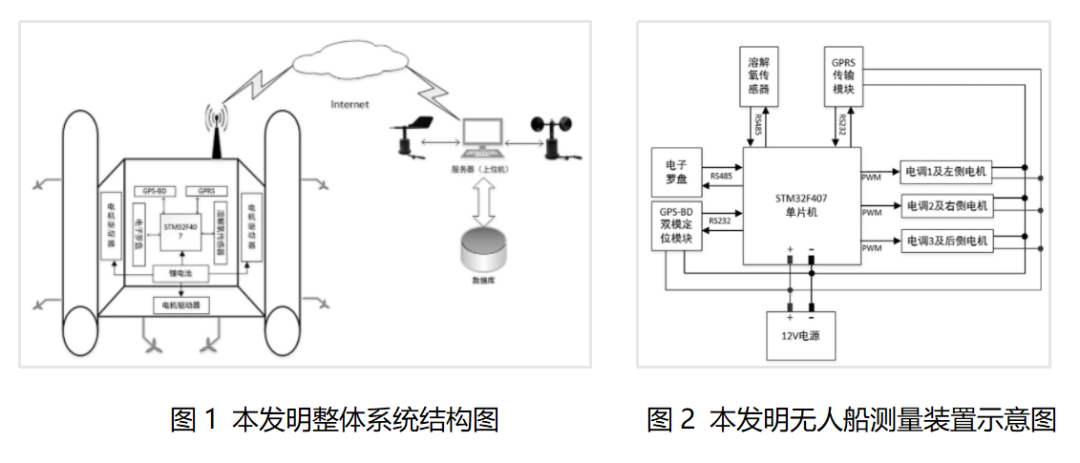
所述服务器后台程序是在Visual Studio2015集成开发环境下由C# .NET语言编写而成的上位机程序,该程序采用Winform框架完成可视化界面,主要用来显示无人船状态信息,例如当前位置的经纬度、方位角、连接状态、目标点水质参数等信息,也可手动发送指令,控制无人船行驶。其中,上位机程序与无人船连接需要调用C#中的Socket方法,连接成功后,无人船上各测量装置通过GPRS‑DTU模块发送到上位机程序。控制模块解算各传感器的采集数据,将数据转成字符串形式发送出去,上位机程序通过String .Split( )方法分割出每项数据,并建立多线程,分别处理每项数据,提高运行效率。上位机程序计算当前点与目标点的方向角,根据当前方位角,调整转向角,向目标点移动,完成自动导航。PC端连接风力风向传感器,同时在有风环境下启动左右两侧螺旋桨,克服周围环境的风浪,减小航行误差。
现有的无人船都是依靠岸基人员手动控制到达指定测量点,需要观测无人船动态和环境。在本发明的无人船服务器后台程序中嵌入地图,在地图中可以设置多个测量点,无人船按照设置的点进行遍历,最终回到原点,无需人工干预。但是在有风情况下,无人船易受到环境影响,偏离预计航线,与预定点误差较大,因此本发明针对有风情况下,通过硬、软件的设计,使得无人船在风浪情况下也可以正常按照原来路线航行,减少误差。
转化方式:转让
成熟度:研制阶段
联系方式:0511-82010055 18118406566(张老师)
江苏汇智知识产权服务有限公司(以下简称“江苏汇智”)成立于2013年,是江苏大学控股投资的科技服务公司,是国家中小企业公共服务示范平台,国家专利运营试点企业、国家知识产权服务品牌机构、江苏省科技服务业“百强”机构、江苏省技术经理人事务所、2019、2020年连续获得江苏省技术转移工作先进集体荣誉,2021年荣获中国产学研合作创新与促进奖。
专利运营团队现有专兼职服务人员30余人,其中全国知识产权领军人才1名,百名高层次人才1名,江苏省知识产权领军及骨干人才4人,专利代理人18人,GB/T29490-2013《企业知识产权管理规范》审核员15人,全国专利信息实务人才3人,硕士以上学历人员占比达70%,10%以上拥有海外工作或留学背景,核心团队平均拥有5年以上知识产权运营经验。
公司构建了政策咨询、人才培养、技术转移和知识产权运营四大业务板块,近五年来,江苏汇智服务了镇江、扬州、苏州、南京、上海、无锡、盐城、重庆、湖南、西安等各地政府、企业开展专利技术筛选与成果转化工作,并根据其切实需求开展调研分析,围绕纳米材料、生物医药、新能源汽车、化学化工等方向构建专利组合,截止2024年底,共计完成专利转让、许可800余件,合同交易额达2000余万元。江苏汇智用真诚赢得客户认可,助推企业创新和产业发展,实现“让创新更有价值”。
汇集智慧 成果速递——江苏汇智专利成果推介专栏(19),干货来了!

